|
Nishan Srishankar I am currently a Senior AI Researcher at the AI Research Lab at JPMorgan Chase.
I was previously a Data Scientist/ Machine Learning Engineer 5 at Fidelity AI and
worked on
applied research for document understanding, and speech recognition.
|

|
News
|
ResearchI am interested in the intersection of robotics (multi-agent/ systems, decentralized control), machine learning (multimodal learning, adaptation, reinforcement learning), human-centered AI. More recently, I have been tying together my work on swarm robotics with LLMs through building systems with robust, heterogeneous, long-term agents that can be improved with continual learning and feedback. I am also trying to break into the (representation) alignment and robustness/trustworthiness fields. |
|
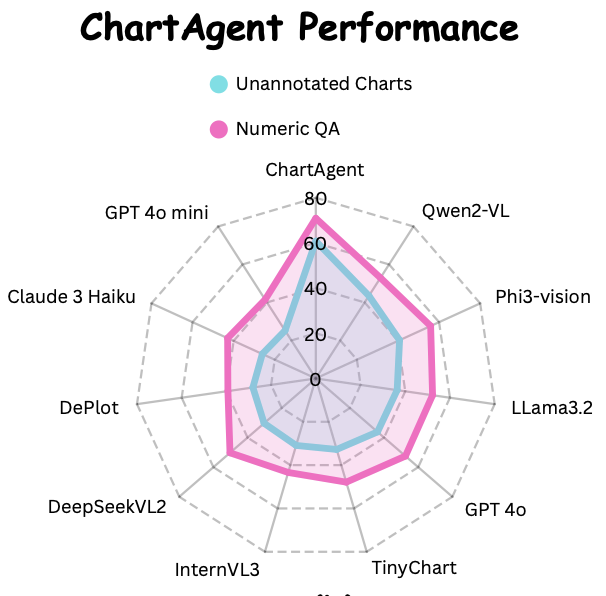
ChartAgent: A Multimodal Agent for Complex Visual Question Answering in Charts
Rachneet Kaur, Nishan Srishankar, Zhen Zeng, Sumitra Ganesh, Manuela Veloso NeurIPS Multimodal Algorithmic Reasoning (MAR) 2025 We demonstrate the value of multimodal procedural reasoning and chart interaction to provide better understanding of complex, unannotated charts. |
|
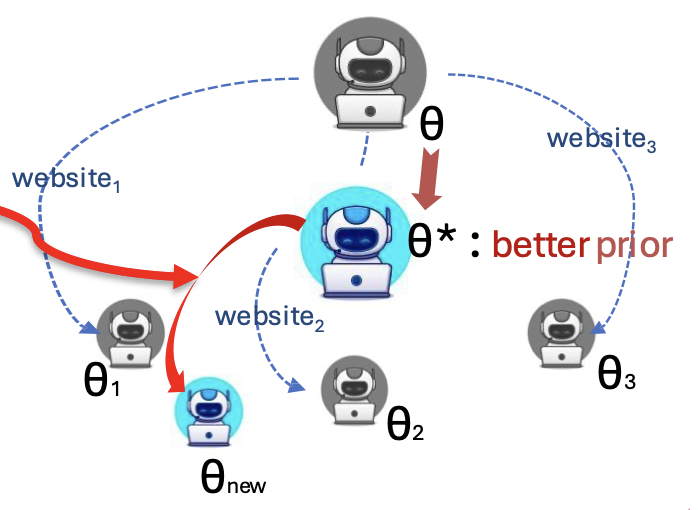
AdaptAgent: Adapting Multimodal Web Agents with Few-Shot Learning
from
Human Demonstrations
Gaurav Verma, Rachneet Kaur, Nishan Srishankar, Zhen Zeng, Tucker Balch, Manuela Veloso Association for Computational Linguistics (ACL) 2025 NeurIPS Adaptive Foundation Models (AFM) 2024 Poster We develop a framework for easy and successful adapting of GUI/web agents to unseen tasks using 1-2 demonstrations in similar domains. |
|
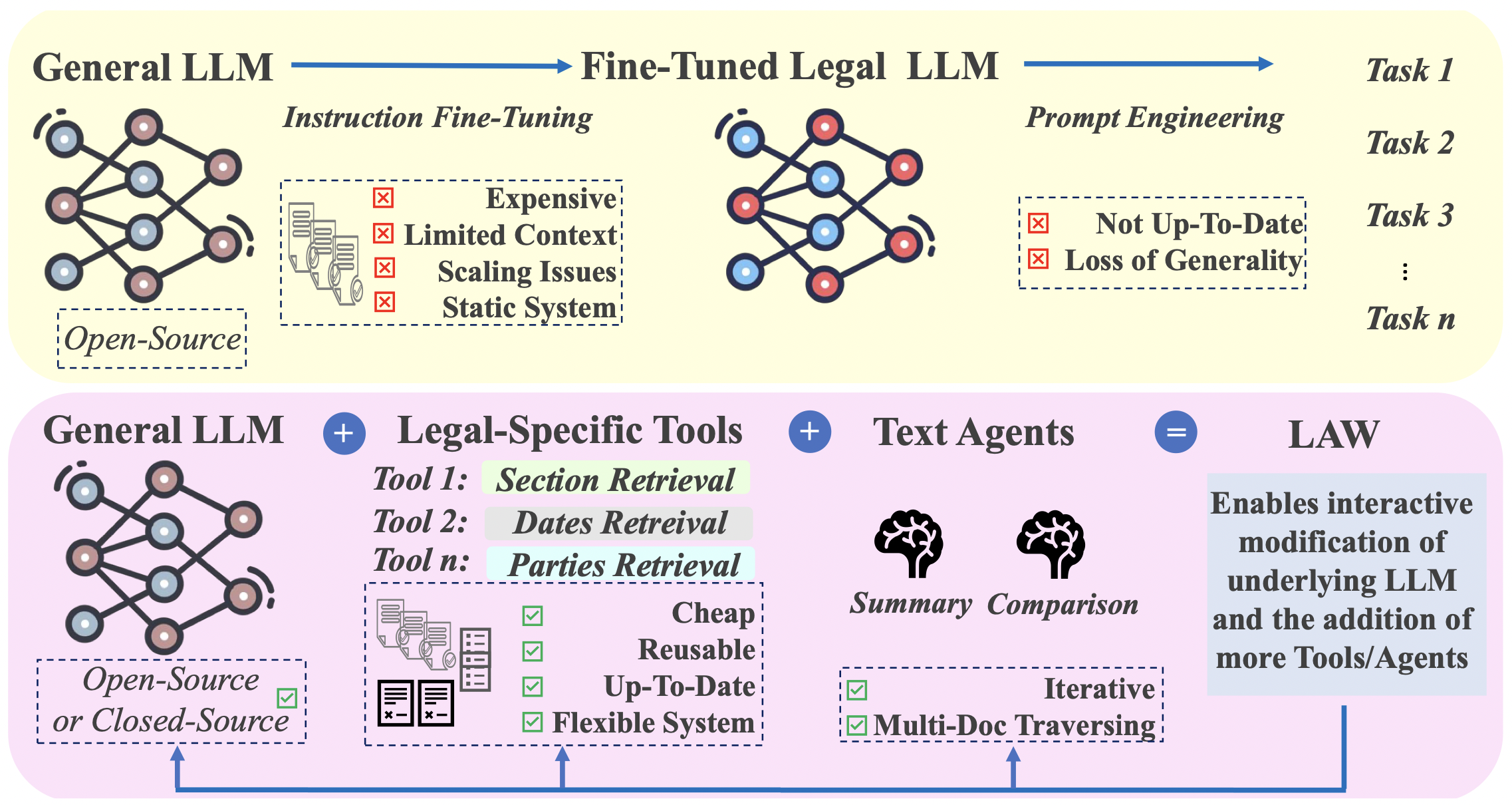
LAW: Legal Agentic Workflows for Custody and Fund Services
Contracts
William Watson*, Nicole Cho*, Nishan Srishankar*, Zhen Zeng, Lucas Cecchi, Daniel Scott, Suchetha Siddagangappa, Rachneet Kaur, Tucker Balch, Manuela Veloso International Conference on Computational Linguistics (COLING) Industry Track 2025 We build an agentic framework and system that uses domain-specific APIs to extract and analyze information asked by users regarding contracts. |
|
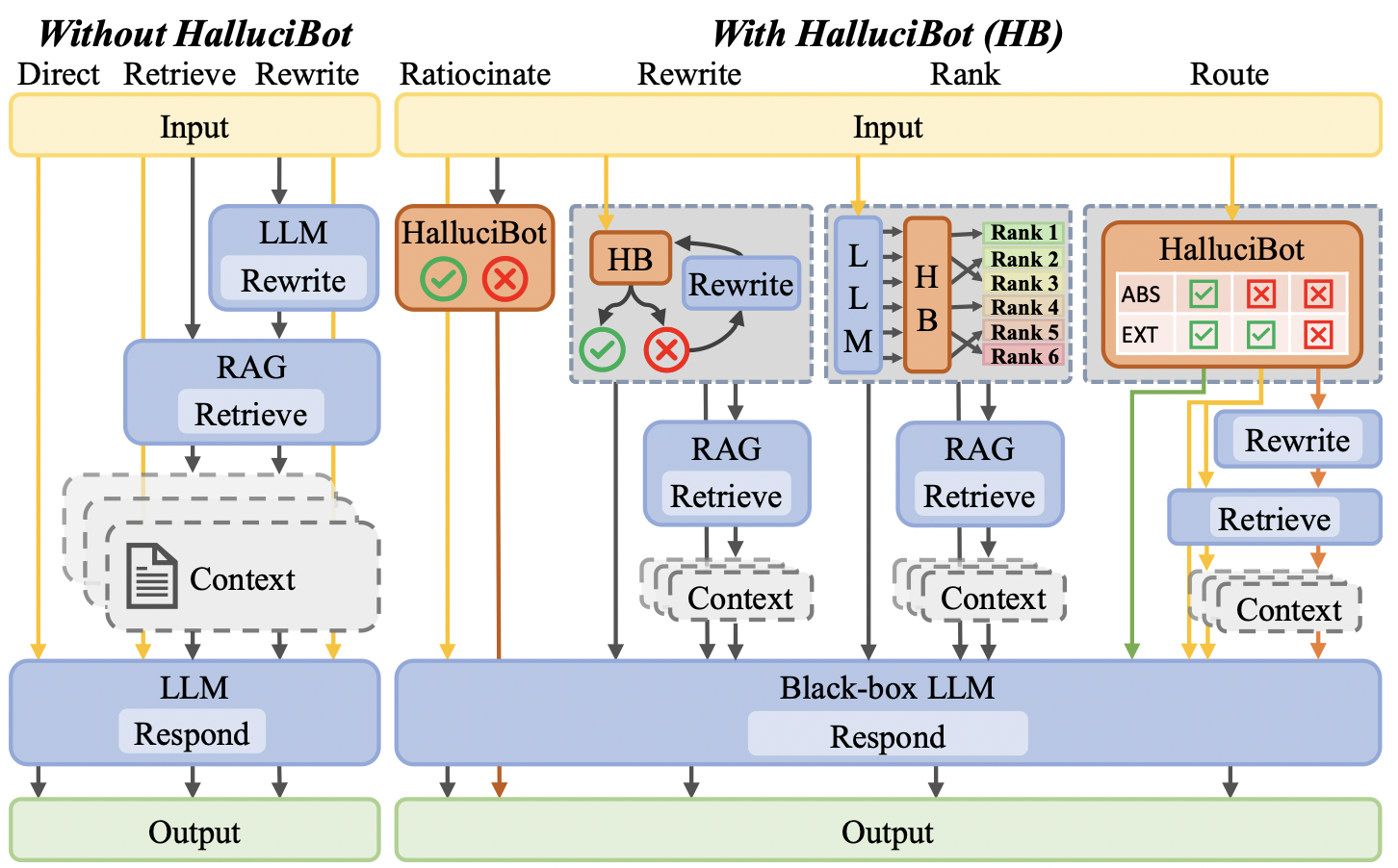
Is There No Such Thing as a Bad Question? H4R: HalluciBot For
Ratiocination, Rewriting, Ranking, and Routing
William Watson, Nicole Cho, Nishan Srishankar Association for the Advancement of Artificial Intelligence (AAAI) 2025 We preempt the chance that an LLM can misunderstand a query and yield incorrect outputs by using a model trained using Monte-Carlo simulations and a query rewriting process. |
|
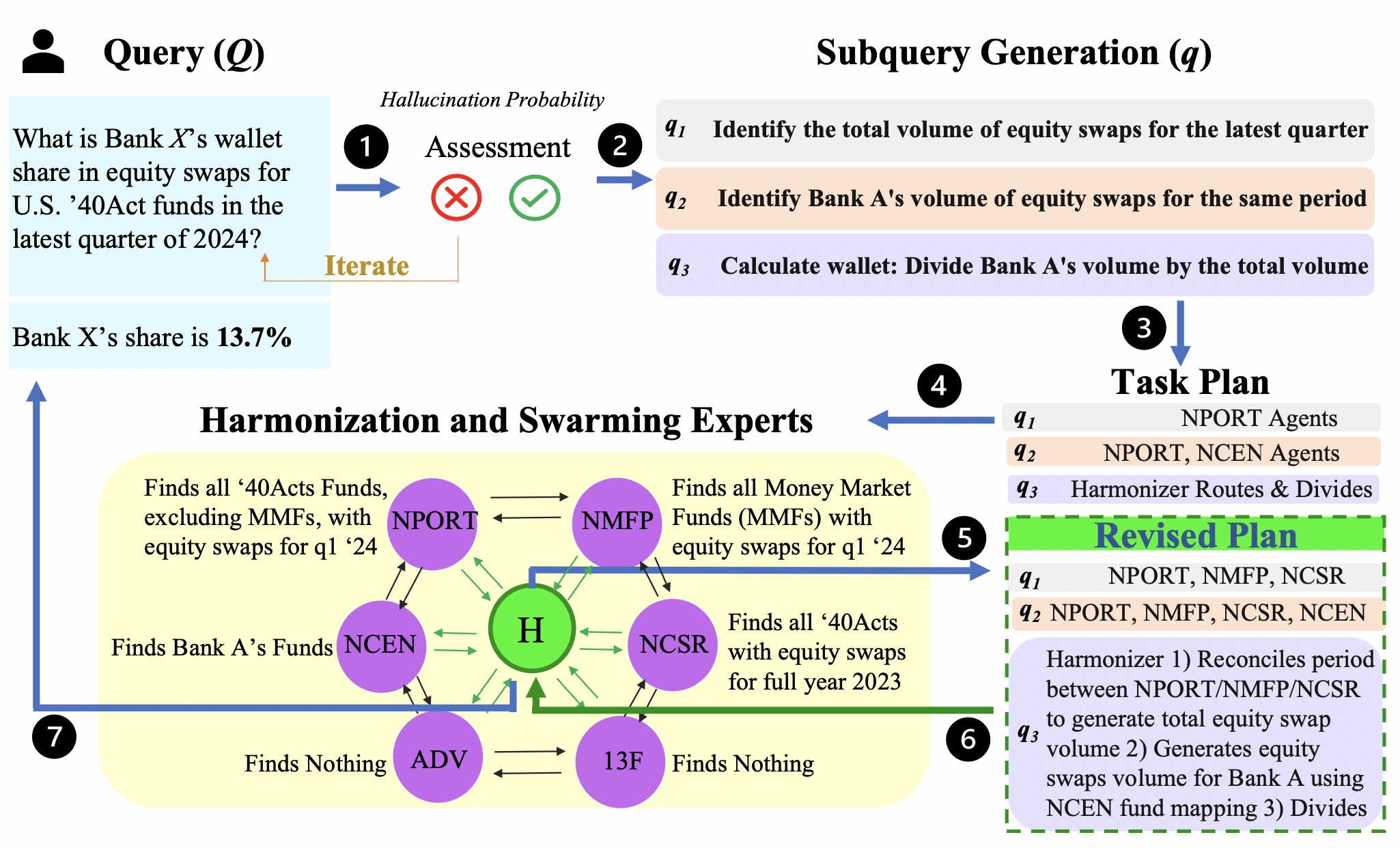
FISHNET: Financial Intelligence from Sub-querying, Harmonizing,
Neural-Conditioning, Expert Swarms, and Task Planning
Nicole Cho, Nishan Srishankar, Lucas Cecchi, William Watson ACM International Conference on AI in Finance (ICAIF) 2024 We construct a heterogeneous multi-agent swarm that answers a query about financial documents by validating the question, breaking it into sub-tasks, and ochestrating the sub-task to agents specialized on particular filings. |
|
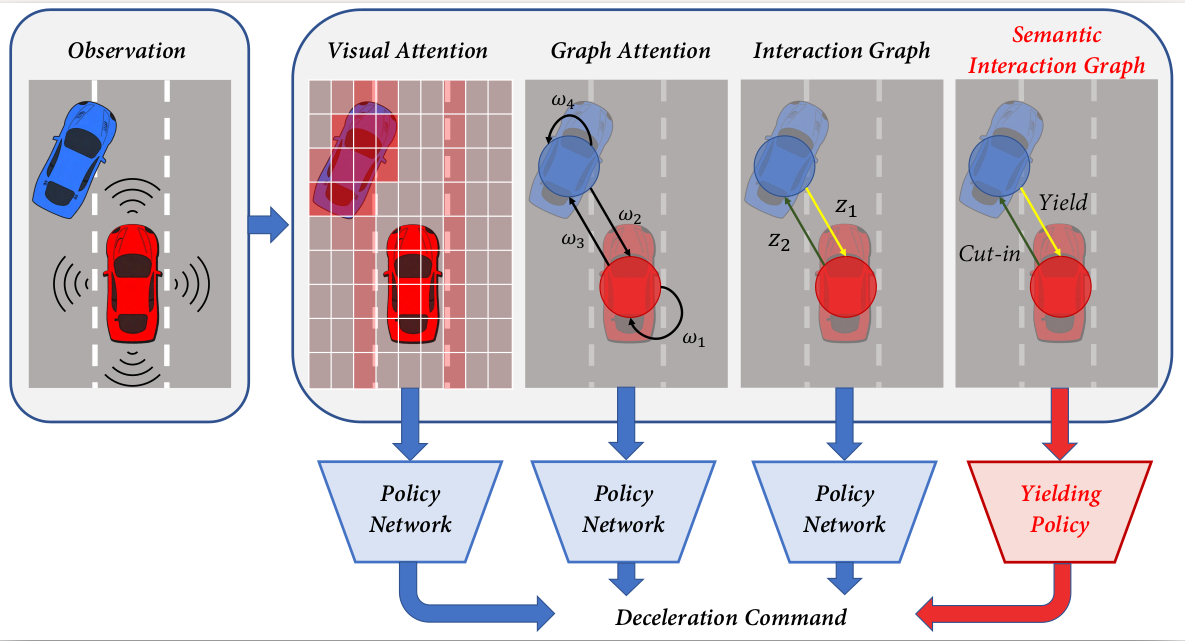
Grounded Relational Inference: Domain knowledge driven explainable
autonomous driving
Chen Tang, Nishan Srishankar* , Sujitha Martin*, Masayoshi Tomizuka IEEE Transactions on Intelligent Transportation Systems 2024 We propose a model that builds human intepretable explanations within the context of multi-agent driving by inferring the underlying system dynamics and agents' relationships using an interaction graph. |

|
Sim2Real Docs: Domain randomization for documents in natural scenes
using ray-traced rendering
Nikhil Maddikunta*, Huijun Zhao*, Sumit Keswani*, Alfy Samuel*, Fu-Ming Guo*, Nishan Srishankar*, Vishwa Pardeshi*, Austin Huang∗ NeurIPS Data Centric AI (DCAI) 2021 Repo We utilize ray-traced rendering of Blender to reduce the sim2real gap and synthesize documents in randomized natural scenes for training downstream models. |
|
|
Explainable Autonomous Driving with Grounded Relational
Inference
Chen Tang, Nishan Srishankar* , Sujitha Martin*, Masayoshi Tomizuka NeurIPS Machine Learning for Autonomous Driving (ML4AD) 2020 Video We develop a framework that generates an interpretable object-level interaction graph by grounding the low-dimensional latent space representation on semantic behaviors with expert domain knowledge and apply this to highway driving behavior. |
|
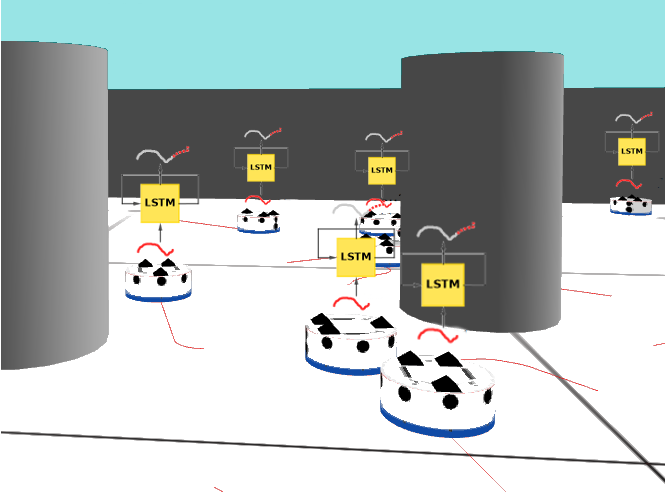
Flow-FL: Data-Driven Federated Learning for Spatio-Temporal
Predictions
in Multi-Robot Systems
Nathalie Majcherczyk, Nishan Srishankar, Carlo Pinciroli International Confernce in Robotics and Automation (ICRA) 2021 We develop data-driven decentralized federated learning for swarm robots without a central aggregating server through a gossip-based conflict-free replicated data structure (CRDT). |

|
Knowledge Discovery Framework: Deep Learning Applications for Remote
Sensing
Megs Seeley*, Francesco Civilini*, Satyarth Praveen*, Nishan Srishankar* , Anirudh Koul, Anamaria Berea, Hesham Mohamed El-Askary American Geophysical Union (AGU) 2020 Poster / AI Showcase We use self-supervision on unlabeled multispectral Earth Observation data to develop a semantic representation encoder for knowledge discovery. |
|
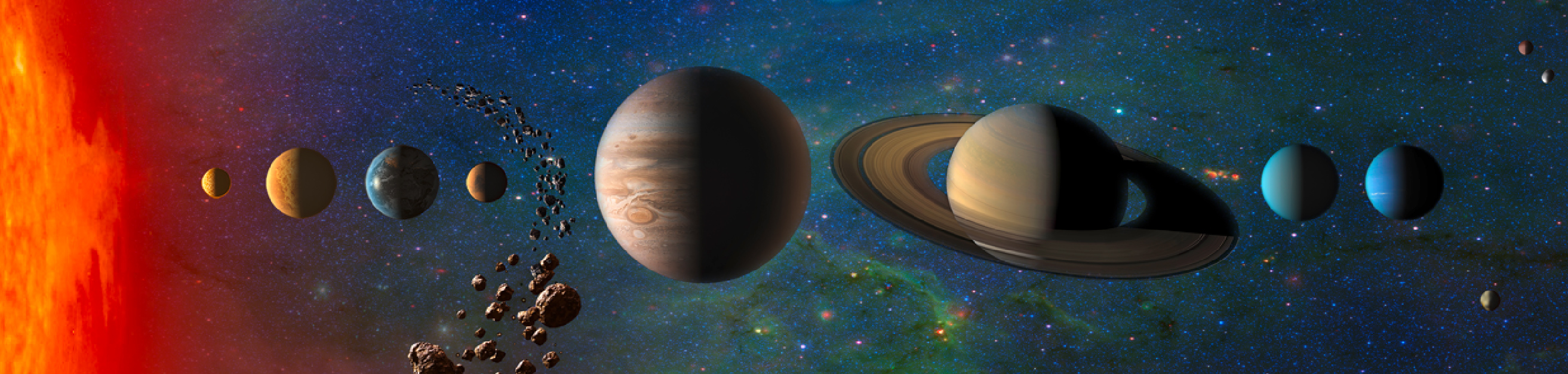
Artificial Intelligence for the Advancement of Lunar and Planetary
Science and Exploration
Indhu Varatharajan*, Valentin Bickel*, Daniel Angerhausen*, Eleni Antoniadou*, Shashwat Shukla*, Abhisek Maiti*, Ross Potter*, Nishan Srishankar*, Frank Soboczenski*, Carl Shneider*, Michelle Faragalli*, Mario D’Amore* Planetary Science and Astrobiology Decadal Survey 2020 We explore AI-driven approaches and the need for open-source development to reduce manual labor and aid future lunar/ planetary exploration through real-time data analysis. |
|
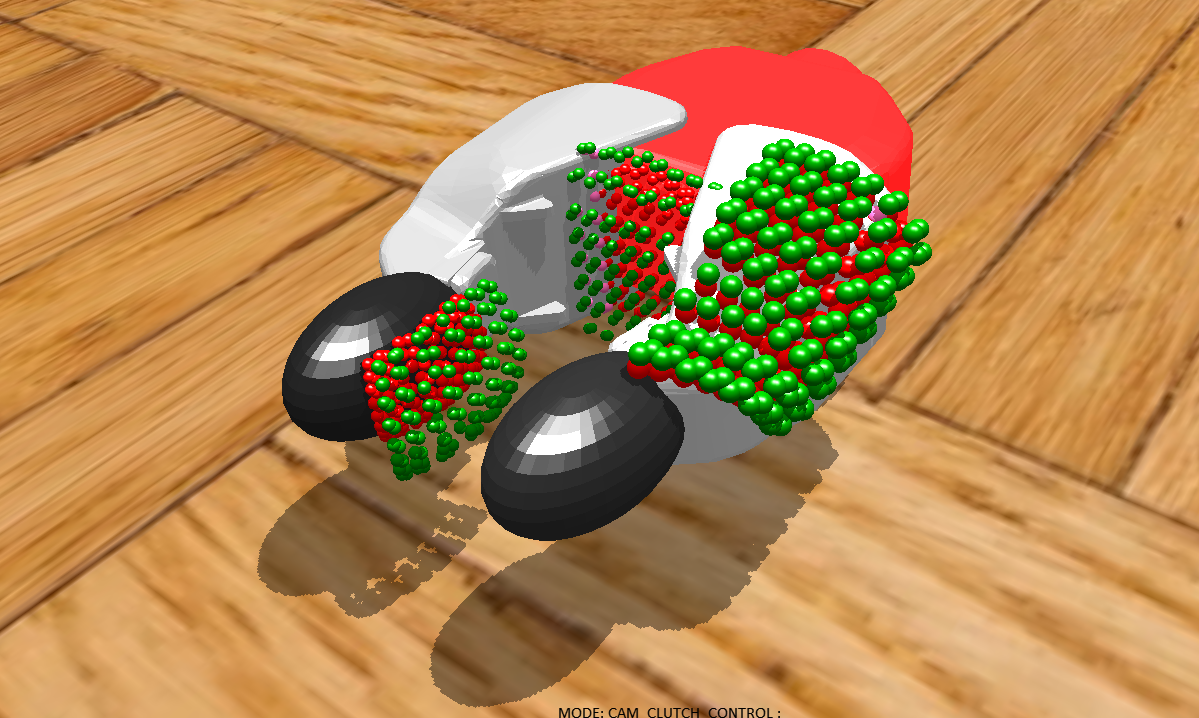
A Parametric Grasping Methodology for Multi-Manual Interactions in
Real-Time Dynamic Simulations
Adnan Munawar, Nishan Srishankar, Loris Fichera, Gregory Fischer International Conference in Robotics and Automation (ICRA) 2020 Video We present a novel parametric method for real-time, realistic, multi-manual grasping and interaction with complex objects. |
|
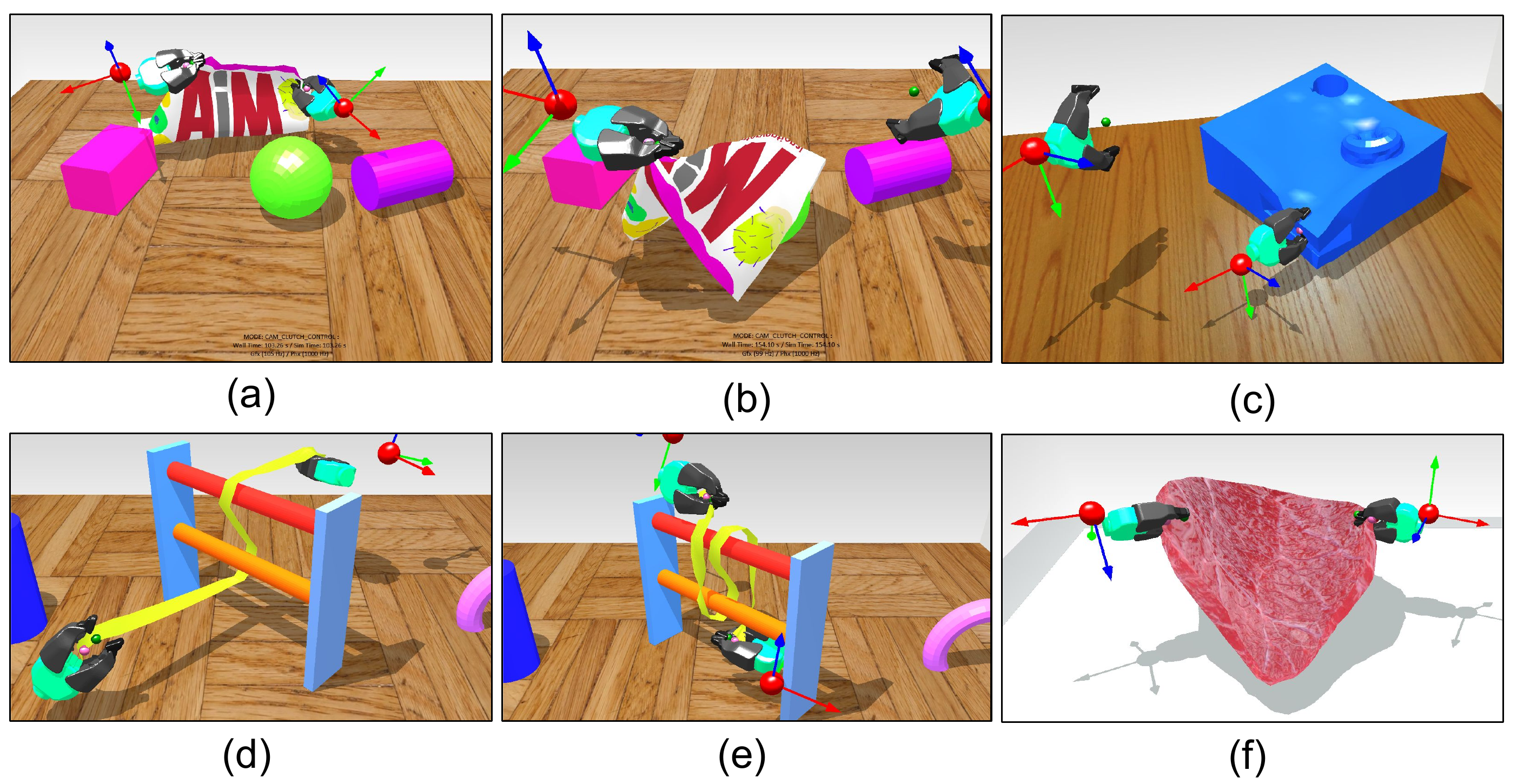
An Open-Source Framework for Rapid Development of Interactive
Soft-Body
Simulations for
Real-Time Training
Adnan Munawar, Nishan Srishankar, Gregory Fischer International Conference in Robotics and Automation (ICRA) 2020 Video We propose a framework which allows simulation of any generic, user-specified soft-body and interaction with a variety of input interface devices. |
|
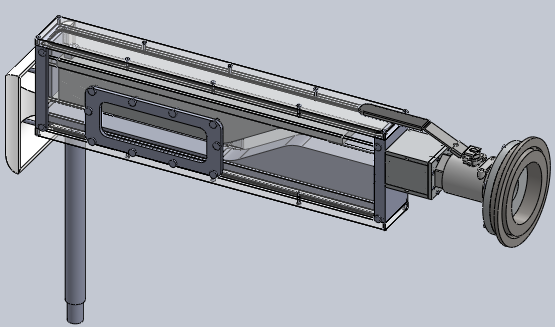
Design and Implementation of a Transonic wind tunnel
Creation of a transonic wind tunnel to to work between M=0.3 to M=0.9 for downstream testing. |
Miscellanea |
Patents |
|
Awards |
|
Service |
|
Teaching |
|
Template: Courtesy of Jon Barron. |